Based on the HRMRP robot platform, a rich robot application can be completed. Taking a typical robot navigation as an example, how to use HRMRP to complete the corresponding functions? This article will detail how to apply HRMRP to real-world applications.
As a distributed framework, ROS is distributed in the layout and configuration of nodes from a microscopic point of view. From a macro perspective, this kind of distribution can be embodied in a multi-robot, multi-host integrated system. There are not many involved in the ROS community for multi-robot systems, and there are few related applications. Based on the HRMRP robot, we try to propose a framework for multi-robot implementation, as shown in the following figure:
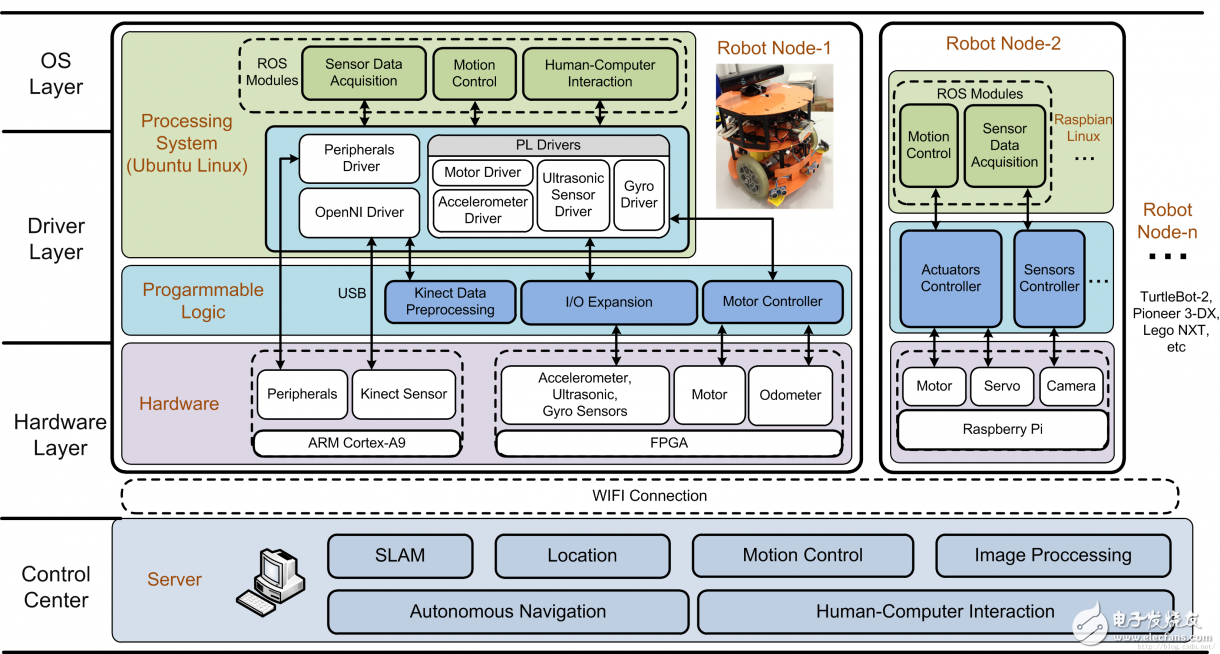
Due to the variety of robot architectures and the ability to process applications, the requirements are different in different situations. We designed the server layer to improve the computing power of the robot application, and responsible for scheduling and allocating tasks in multi-robot applications. Provide users with a friendly and easy to use human-computer interface.
The distributed robot nodes and servers are designed with ROS framework, and wireless network communication can quickly integrate the rich application functions in the ROS community. In a multi-robot system, through the sharing of information between robots and collaboration with tasks, each robot can gain more additional application potential while fully utilizing its capabilities.
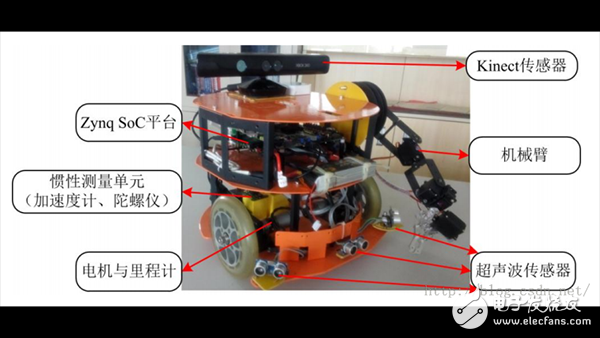
3. Robot NodeThe robot node is the executor of the application and the collector of the information. In this system, a variety of robots using ROS framework can be integrated. Here we take the HRMRP robot platform designed by us as an example. The previous blog has been introduced in detail.
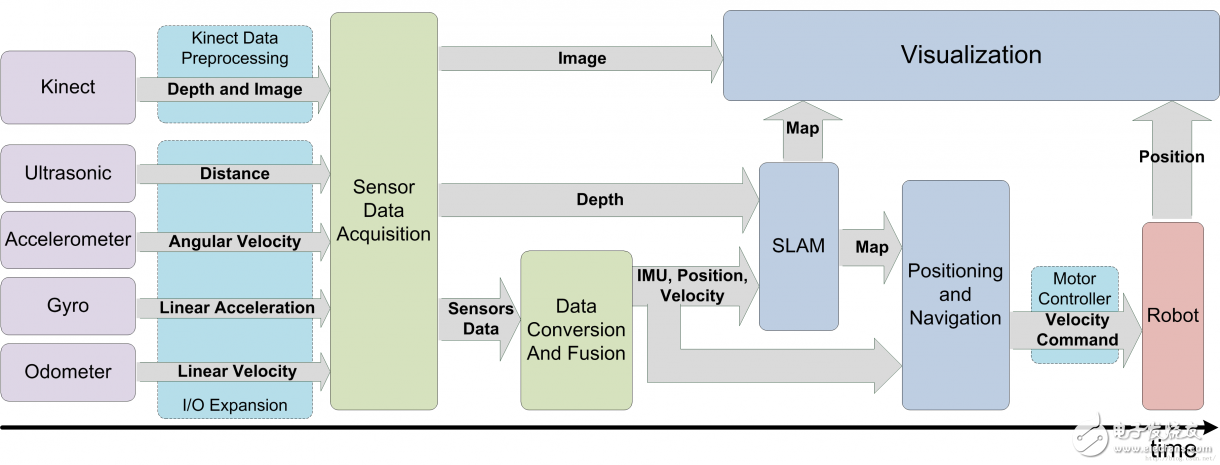
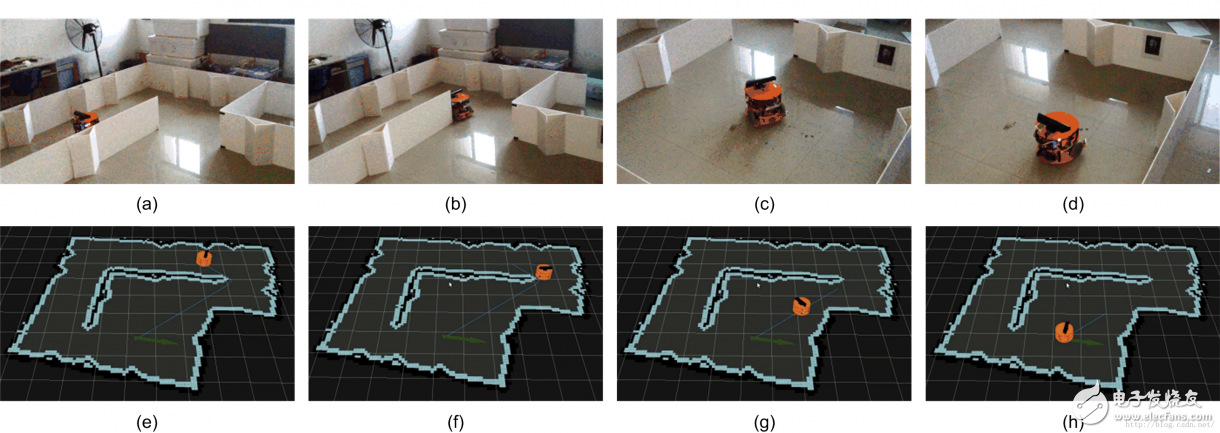
4. Robot navigationThe HRMRP robot platform adopts the embedded system as the main control. The processing ability of complex algorithms such as robot navigation is limited. Therefore, we implement the processing of the application on the server side. The robot publishes the collected surrounding environment information and its own sensor information, and the server subscribes. The message is processed and displayed, and the control command is issued downward.
The data processing flow is as follows:
The effect of SLAM is as follows:
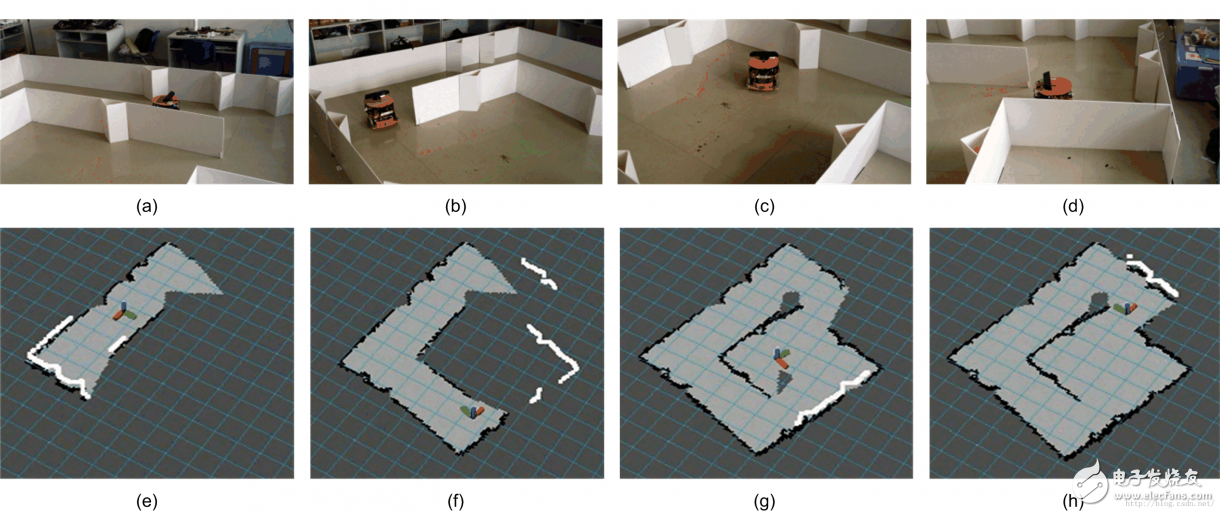
The navigation effect is as follows:
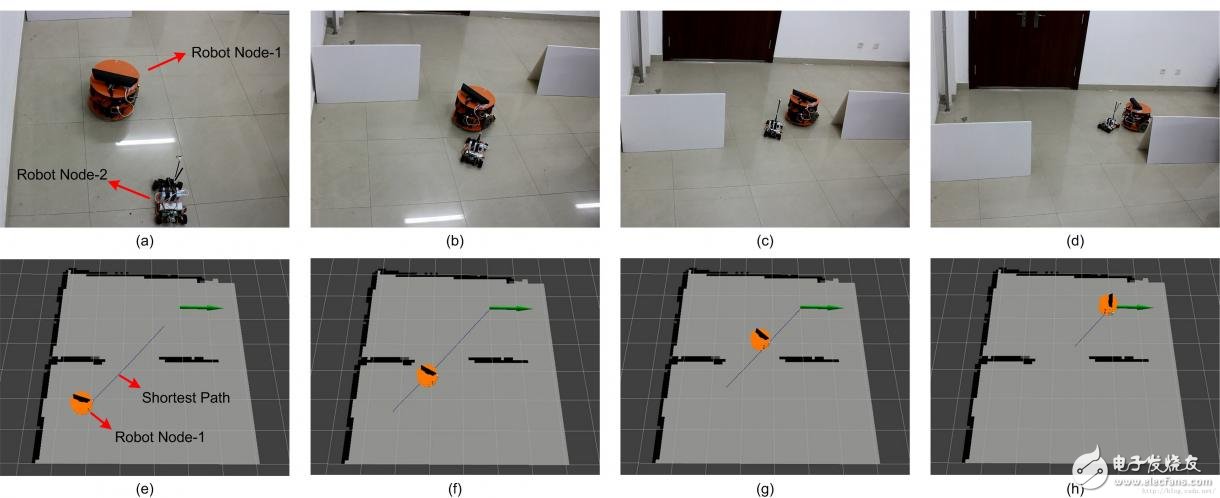
Of course, the system's support for multiple robots is also very good. Due to limited time, we only did a simple robot following experiment. The experiment used two robots, in addition to the HRMRP robot, a simple small robot was created using the Raspberry Pi. In the experiment, the HRMRP robot navigates autonomously on the map. The server is responsible for the processing and display of the application. At the same time, the location information of the HRMRP is forwarded to the Raspberry Pi robot. After receiving the information, the Raspberry Pi robot follows HRMRP.
The experimental results are as follows:
Connector cable for LED display
China Connector Cable For Led Display,Ribbon Cable manufacturer, choose the high quality Flat Rainbow Cable,Ribbon Cable Extension, etc.
Common data cable types are :HDMI Cable, VGA cable, DVI cable three categories, in addition to the popular Display Port(DP) and Mini Display Port Cable in recent years, And the latest Thunderbolt, which is used in Apple's post-2010 Mac line.
Common power cables are as follows: Three-pin or two-pin ports.
Connector Cable For Led Display,Ribbon Cable,Flat Rainbow Cable,Ribbon Cable Extension
CHANGZHOU LESEN ELECTRONICS TECHNOLOGY CO.,LTD , https://www.china-lesencable.com