
Controlling a UAV involves managing its various states, as discussed in the article "Study in the Castle: State Perspective Deep into UAV Hardware and Algorithm." The process of converting GPS data into UAV status information is a clear example of how real-time position tracking works. Now, it's time to explore how this functionality is implemented in a real-world drone system, as explained by Mr. Castle.
Mr. Castle starts by selecting a specific drone for the demonstration. The chosen system must have a simple yet practical hardware architecture and algorithm setup, with strong follow-up performance and an intuitive operating system.
I ultimately went with the Skye Orbit drone, which I was very excited about at CES Asia. I’d like to thank Skye Smart for their support, even though they were in a tight shipping phase. They were still enthusiastic about providing prototypes and testing environments. The Skye engineers successfully completed the experiment. Although Mr. Castle isn’t promoting it, students interested can check out the Kickstarter page for more details.
How do you design a drone system to implement a following function?

The first step is to choose the controlled state. Wait—why choose a state when the drone already has inner and outer loop states? This choice reflects the flexibility of drone system design. A following function can be based on relative position navigation, allowing the system to either control the drone’s absolute position or its relative position to a target. This means the distance between the drone and the target can act as an extended state. Data fusion can then combine both absolute and relative position data using various methods.
Don’t underestimate the impact of this decision—there are many paths to Rome, and each path leads to different outcomes. Different state choices reflect varying understandings of movement, leading to different hardware designs and algorithm architectures.
Looking directly at the drone product, let’s see how Mr. Castle explains how Skye Orbit implements its following function through hardware and algorithms:

The Skye Orbit UAV system includes a wristband tracker with built-in GPS. This suggests that Orbit tracks the six outer-loop states of the target in real time: position [x, y, z] and velocity [u, v, w].
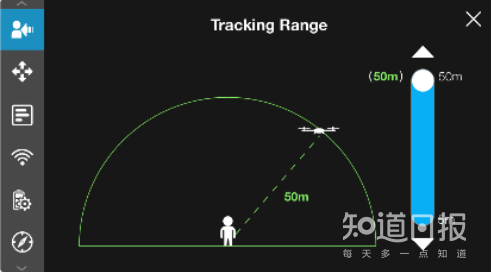
The desired distance between the drone and the target can be set via the app. Depending on the setting, the system maintains a fixed relative distance. By using the target’s state information and the expected distance, Orbit calculates the desired position for the drone, compares it with the current state, and applies corrections through its algorithm. This approach avoids unnecessary data conversion that would otherwise occur if relative distance were treated as a system state.
Is this how the following function is implemented? However, a drone isn’t just a floating device that relies solely on signals. Position following is just one part of the function. The system also needs to collect high-quality visual data while maintaining its position, making it a full robotic system rather than just a fancy gadget with limited capabilities.
GPS /Glonass/Beidou/Galileo Antenna
1. According to the polarization mode, GPS Antenna can be divided into vertical polarization and circular polarization. With current technology, vertical polarization is not as effective as circular polarization. Therefore, GPS antennas will be circularly polarized except in special cases. 2. GPS antenna is divided into internal antenna and external antenna in the way of placement. The location of the antenna is also important. At this time, the antenna is basically isolated from the interior of the whole machine. EMI is almost not affected. The satellite reception effect is very good. Now, with the trend toward miniaturization, GPS antennas are mostly built in. In this case, the antenna must be higher than all metal components, and the shell must be electroplated and well grounded, away from EMI interference sources, such as CPU, SDRAM, SD card, crystal oscillator, and DC/DC. The use of GPS in cars will become more common. And the car casing, especially the car explosion-proof film can seriously block the GPS signal. An external antenna with magnets, which can be attached to the roof, is essential for onboard GPS. GPS antenna structure
GPS Antenna,GPS Antenna for Car,GPS Antenna SMA,GPS Antenna Fakra,Inside GPS Antenna
Yetnorson Antenna Co., Ltd. , https://www.yetnorson.com