What is the UAV obstacle avoidance technology?
As the name implies, it is the intelligent technology that drones autonomously avoid obstacles. Many of the friends who have played with drones know that drones with obstacle avoidance and drones without obstacle avoidance can be said that the experience is very different! The UAV automatic obstacle avoidance system can avoid obstacles in the flight path in time, greatly reducing the losses caused by operational errors. While reducing the number of bomber accidents, it can also greatly help the novices newcomers!
UAV obstacle avoidance technology development stage and trend
According to the current development of UAV obstacle avoidance technology and its future research situation, some data analysis shows that UAV obstacle avoidance technology can be divided into three stages, one is the obstacle obstacle phase; the other is to bypass the obstacle phase; It is the scene modeling and path search phase. These three stages are actually the process of the UAV obstacle avoidance technology. From the discovery of obstacles by drones, to the process of automatically bypassing obstacles and then reaching the self-planning path.
Some people may ask the drone to reach the first stage of “discovering obstacles†and it is not easy to avoid obstacles. This second stage is not superfluous! In fact, the division of the three stages of UAV obstacle avoidance is based on technology. The specific technical analysis of each stage is as follows:
In the first stage, the drone can only be a simple obstacle to the obstacle. When the drone encounters an obstacle, it can be quickly identified and hovered, waiting for the next step of the drone driver!
In the second stage, the drone can obtain the depth image of the obstacle, and thus accurately perceive the specific contour of the obstacle, and then autonomously bypass the obstacle! This stage is to get rid of the flying hand operation and realize the stage of drone autonomous driving!
In the third stage, the drone can build a map model for the flight area and then plan a reasonable route! This map can't just be a mechanical plane model, it should be a three-dimensional map that can be updated in real time! This will be the highest stage of the current UAV obstacle avoidance technology!
At present, there are three main types of electric multi-rotor UAV obstacle avoidance systems on the market, namely ultrasonic, TOF (a type of laser radar ranging) and visual ranging that is expected to become mainstream. The following are the latest application cases of unmanned aerial vehicle obstacle avoidance technology at home and abroad.
1, zero degree Xplorer 2: lidar TOF ranging
TOF is a shorthand for TIme of flight, literally translated into flight time. The so-called time-of-flight 3D imaging is to obtain the target distance by continuously transmitting light pulses to the target, then receiving the light returned from the object with the sensor, and detecting the flight (round-trip) time of the light pulse.
In this way, the light wave is easily interfered, and the light emitted by the system must avoid the main energy band of the sunlight, thereby avoiding direct interference and reflection of sunlight to the obstacle avoidance system. This principle requires very accurate time measurement, requires a dedicated processing chip, and the chip price is relatively high.
The Xplorer 2, which was released at CES2016, uses the TOF ranging Solution. The “mushroom head†on the drone is an automatic obstacle avoidance module. The obstacle avoidance module can realize 360° omnidirectional scanning at a rate of 50 times per second within a 6m effective obstacle avoidance distance.

Xplorer 2 automatic obstacle avoidance module
2, soaring Typhoon H: Realsense (monocular + structured light)
The technical principle of Realsense is that it adopts the principle of "active stereo imaging", which imitates the "parallax principle" of the human eye. By shooting a beam of infrared light, the left infrared sensor and the right infrared sensor are used to track the position of the light, and then The principle of triangulation is used to calculate the "depth" information in the 3D image. With a depth sensor and a full 1080p color lens, it accurately recognizes gestures, facial features, foreground and background, allowing the device to understand human movements and emotions. According to data released by Intel, Realsense's effective ranging can reach 10 meters.
Realsense belongs to "monocular + structured light", that is, a single camera plus structured light emitter constitutes a depth camera. However, the structural light is a "light to die", "structural light is only suitable for dark environments, indoors. For å•¥intel to get a dark environment like a tropical rainforest? Because it will be disturbed!" Lei Hongyun founder Liao Hongyu said that because The 3D depth camera is changed to a 2D depth camera, and its "monocular + structured light" smart navigation module costs only 200 yuan.

Typhoon H integrates Intel's Realsense module
3, Dajiang Elf Phantom 4: binocular vision + ultrasound
The dual-purpose ranging principle, like our two human eyes, sees different images. If it is a point, the two eyes see that there are differences between the two images, and the triangulation can be measured by triangulation. The distance of this point.
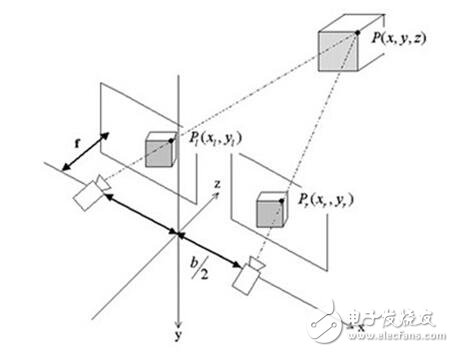
Binocular vision system schematic
Phantom 4 adds binocular obstacle avoidance. In fact, it uses the core algorithm of guidance to identify obstacles up to 0.7 meters and up to 15 meters. The horizontal angle of view is 60° and the vertical angle of view is 30°. The advantage of binocular vision is that at a long distance, binocular vision can ensure three-dimensional accurate information, such as two mountains in the distance can see a near one far. Of course, small targets in the distance are not acceptable.

Phantom 4 lower vision visual positioning module
4, very flying: avoiding obstacles at night using active near-infrared illumination technology
Extreme flying to avoid obstacles at night is because most of their plant protection operations are carried out at night. In fact, the principle of achieving obstacle avoidance at night is not complicated.
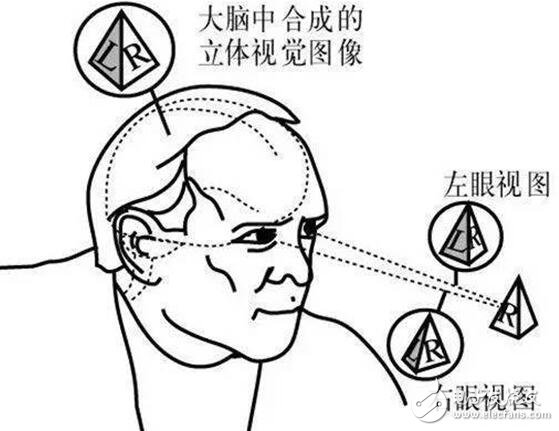
First, the principle of obstacle avoidance is that the forward obstacle avoidance is binocular obstacle avoidance. It uses the two eyes of the imaging device to acquire two images of the measured object, and obtains the three-dimensional information of the object by calculating the positional deviation between the corresponding points of the image. Including the distance between the camera and the object and the distance between the objects. It is based on the parallax principle and is an important form of computer vision, which is similar to the principle that the human eye perceives three-dimensional information of objects. Refer to this interesting picture below.
The night-time obstacle avoidance is the use of this active near-infrared illumination technology. Simply put, a special flashlight is added and the eyes are modified. At night, this eye can hardly be seen (the same as the existing products of Dajiang), and the binocular used by the flying fly is composed of two black and white lenses, which can be imaged from the 380-1080nm band, which means not only visible light, but also visible light. You can also see the infrared rays that are invisible to the human eye.
(The middle strip is mounted for transmission and the sides are for receiving)
The unmanned person actively emits near-infrared light. The near-infrared light is an electromagnetic wave between visible light and mid-infrared light. Although it is invisible to the human eye, it can be used as a light source at night, and each lens of the dual purpose can receive the environment. The infrared feedback can be "perceived" to the environment and obstacles after binocular calculation (same as daytime calculations). Moreover, the obstacle avoidance distance is unchanged from daytime, and is 30 meters (angle: horizontal FOV 65°).
In fact, this principle was not created by the ultra-flying. It was used very early in the military. During the Second World War in the United States and Germany, the first generation of active infrared detection devices was used on the battlefield, and the light source equipment provided by itself took the initiative to generate near The infrared radiation illuminates the target area, and then receives the infrared signal returned by the target, and converts it into a visible image for observation and analysis. For example, the vehicle-mounted active infrared night vision device developed in Germany can be used for concealed travel under no-light conditions at night, and by this means avoids the surveillance of the Allies and secretly transports the V-2 missile to the front line.
And here, at present, all civilian drones can't avoid obstacles at night or when the light is not good? In fact, we can look at those obstacle-free drones that have been seen to die, and whether they can survive at night.
5. Oculii, a company in Ohio, USA: Four-dimensional radar technology
Most of the traditional civilian radar can only provide two-dimensional information, but people live in three-dimensional space, and two-dimensional information is not enough. For example, today's civilian radars are unable to measure the height of the car, and this has great limitations for applications such as unmanned vehicles and drones. Oculii, a company based in Ohio, developed the world's first commercially available 4D radar, enabling drones to acquire up and down spatial information in three dimensions.
Summary: In the future, drones will not only adopt a single technology to achieve obstacle avoidance, but may adopt a variety of obstacle avoidance technology integration methods to achieve obstacle avoidance in different scenarios.
Wireless smart IoT energy meter is mainly used to measure three-phase active power in low-voltage network. Prepaid Energy Meter using gsm has the functions of RS485 communication,2G,4G,NB-IoT and 868MHZ/923MHZ/433MHZ Lora/Lorawan wireless communication. lorawan electricity meters is convenient for users to monitor, collect and manage electricity. prepaid electricity meter display in construction can be flexibly installed in the distribution box to realize the measurement, statistics and analysis of individual electric energy in different regions and loads.

Smart Iot Wireless Energy Meter,Three Phase Wireless Energy Meter,Iot Multi Channels Energy Meter,Smart Prepaid Energy Meter
Jiangsu Acrel Electrical Manufacturing Co., LTD. , https://www.acrel-factory.com