People pay more attention to the safety of cars. The application of high technology in cars is endless. The lane departure warning (ldw) system is an example. Experts point out that about 50% of car accidents are caused by deviation from the normal driving lane. The main reason is that the driver is distracted, inattentive or tired. The ldw system will remind the driver when the vehicle is driving at high speed that the car is deviating from the normal driving lane, allowing the driver to correct the driving route in time. This is another safety device installed in the car after the safety belt and the safety bladder.
System Overview
Figure 1 is a schematic diagram of the ldw system. A front-facing camera monitors the road on which the vehicle is traveling, with a range of up to 50-70 feet. Typically, one or more cmos image sensors provide multi-post images of the road, and these sensors are connected to multiple video ports of the processor. Here, video-based signal processing replaces the analog signal chain. This processing method not only improves the accuracy of the system, but also saves the system's material cost.
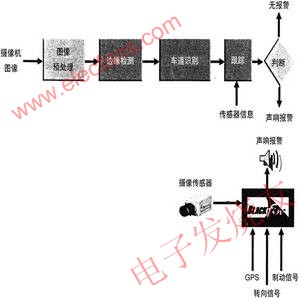
Figure 1 ldw system and external connection diagram
After the data enters the system, it is transformed into a format that can be processed in real time. Inside the processor, it is first preprocessed to filter out noise mixed during image capture. Then detect the position of the vehicle relative to the lane markings. The input information stream of the road image is transformed into a series of lines that outline the road surface. Find the edge in the data field to find the lane marking. These edges actually form the boundary that the vehicle should keep moving forward. The processor must keep track of these marking lines to determine whether the driving route is normal. Once it is found that the vehicle has inadvertently deviated from the lane, the processor makes a judgment and outputs a signal to drive the alarm circuit, allowing the driver to immediately correct the driving route. The form of alarm can be a buzzer or a horn, it can also be prompted by language, and a vibration seat can be used to remind the driver.
The ldw system also takes into account the braking and steering devices normally used by the car. These devices will affect the work of ldw and complicate the system. Therefore, the ldw system does not work when driving at a slow speed or braking or normal steering.
work process
Figure 2 describes the internal workflow of the processor in more detail. In general, the ldw system must have two major functions, namely edge detection and tracking. The former is used to determine the lane marking; the latter allows the vehicle to travel along the normal lane. Before performing digital processing, smooth filtering is first required. Since the image sensors are not ideal, meteorological conditions, ambient temperature, vehicle movement, and electromagnetic interference will introduce noise during the image acquisition process. The noise makes the image blurred, more precisely, the original image is originally in the same grayscale The pixels with different values ​​are at different gray levels in the noise image.
In addition to noise, there is also the effect of quantization error, which will cause the boundary of the edge to fall on multiple pixels, and also make the boundary less clear. Noise and quantization error cannot be controlled, so it is very difficult to find clear road signs without filtering and smoothing the input video stream without this step. Smooth filtering of digital video streams should also take into account that the video stream is a real image sequence that changes at a specified rate. The working speed of the image filter should be fast enough to ensure that it can keep up with the continuous reception of the input image. Therefore, the image filter kernel is crucial for the optimal execution of the least possible number of processor cycles. An effective filtering method is to use the basic two-dimensional convolution operation.
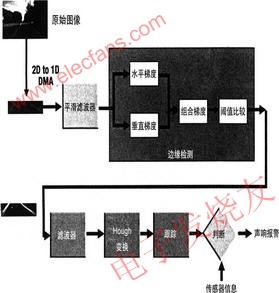
Figure 2 ldw system internal image processing algorithm flow
The next thing to do is edge detection. The so-called edge refers to the most significant part of the local brightness change of the image. For digital images, the change of the gray value of the image can be expressed by the gradient, sobel operator is a commonly used edge detection algorithm. The edges found can determine the signs of the roadway. This process also involves hough transformation. It is one of the basic methods for identifying geometric shapes in image processing. The most basic Hough transform is to detect straight lines from black and white images. It maps the pixels on the image plane to the points on the reference plane (ie a buffer), and determines the parameters of the straight line through statistical characteristics.
Hough transform calculates a sinusoidal curve for each pixel in the input image, so the calculation workload is very large, and you need to use skills to speed up the calculation. First, some calculation results can be calculated in advance, so it can be used as a reference value through a lookup table. Second, make some reasonable assumptions about the position and nature of the roadway signs in the input image, that is, if only the points of the potential roadway signs are calculated, a large number of unnecessary calculations can be avoided, thereby simplifying Calculate and improve quality.
The output of the hough transform is a set of straight lines, some of which may be lane marking lines. Since many highway lane marking lines are standardized, a certain set of rules can exclude certain straight lines from the candidate lane marking lines. Finally, this set of possible lane marking lines is used to determine the position of the vehicle .
Lane tracking
Lane information comes from a variety of possible sources of information in a car. These sources of information combined with measured relevant parameters (such as speed, acceleration, etc.) help lane tracking. Based on the measurement results, the lane system makes intelligent judgments, that is, whether an unintentional lane deviation has occurred. In more advanced systems, other parameters such as time, road conditions, and driver alertness can also be modeled.
Predicting lane geometry is a tricky problem, and it is often solved with the Kalman filter predicting the curvature of the road. The Kalman filter can predict the future state, and then use it to calculate the parameters of the next frame to reduce the calculation load in the Hough transform.
Once the processing framework is established, the system designer can add his own ip in every judgment step in the processing thread. The simplest system should take into account the attributes of the vehicle in the judgment process. For example, to suppress lane change warnings when turning or using brakes. In other words, the system should be able to tell whether the lane change was intentional or unintentional. More complex systems can also involve GPS coordinate data, driving routes, time, climate, and other parameters.
Application
Iteris is one of the first companies to develop ldw system. Its autovue ldw system is a self-installable kit, including wiring harnesses, speakers, switches, connectors and cables. It is said that under normal circumstances, the installation can be completed within three hours. It is suitable for the vast majority of Ding used in North America—Category 8 trucks with the 1930 data bus. The three major European manufacturers evobus gmhh, mercedes-benz omni busse and man busse have also approved this product.
infiniTI has developed a new ldw system that uses a small camera mounted on the front windshield, a speed sensor, indicator and audible alarm. The company plans to equip it on the popular fx off-road suv car. The company is also preparing to deploy the ldw system in the next-generation luxury m45 performance sedan car.
Mobileye's ldw system uses a monocular image processor to determine the lane markings of the road and measure the vehicle's position relative to the markings. Its characteristic is that it can detect all kinds of marking lines, solid line, dotted line, box type and cat's eye. When there are no marking lines, the system uses the road boundary line to determine the location. The system fits three road model parameters of lateral distance, slope and curvature to improve the reliability of the alarm. The system can also work in rainy days and nights.
Our Wired Backup Camera Systems come with waterproof night vision backup camera and varies of Rear View Mirror Monitor. The system will help you reversing conveniently and keep your vehicle safe. Suitable for RV`s, Pickup, Trailers, Trucks, Buses.
1,Wired Backup Camera System for Truck/Van/Caravan/Trailers/Camper/Pickup/5th Wheel/Bus.
2, 7/9/10.1 inch monitor has a pixel resolution of 800 x 480 and displayed is a sharp clear digital image. Monitor has 2 Channel Video Input; V1/V2 optional. PAL&NTSC for choose. Monitor automatically turns on and switch to Rear View Camera when reversing.
3, Backup camera Infrared Night (IR) Vision With 10/12/18/28infra-red lights, it will be able to see up to 50ft even in complete darkness. Using the latest generation of image sensor chip, excellent color effect.
4, Hard metal cased heavy duty camera with IP68 Waterproof and Mud proof, Designed and tested for extreme climates.
5, System comes complete with a 66'(20 Meters) cable with aircraft grade connections and all components necessary for installation.
Wired Backup Camera Systems
Backup Camera System,Wired Backup Camera Systems,Quad View Monitors,Wired Vehicle Backup Monitor
Shenzhen Sunveytech Co.,LTD , https://www.sunveytech.com